|
已经有朋友不耐烦了,婆婆妈妈都唠了十个问题,咋还不到EOTS/EODAS呢?
别急,您要的菜——来了:
问题十一、什么是EODAS?
问题10谈到的“光轴合一”共光路光电设备,比问题8的分立式的FLIR/IRST有了很大进步,但隐身性依然欠佳,随着四代机的兴起,光电设备的隐身布局,终于催生了我们文章开头提到的分布式孔径探测技术。
EODAS(electro-optical distributed aperture system),光电分布式孔径系统,就是美国诺格公司为四代机设计的内置综合光电设备。曾经一度希望能用在F22上,但因为技术成熟度不足,未能实现F22的早期批次实装,却终于用在了F35上。
EODAS在F35上的正式设备型号是:AN/AAQ-37。其核心器件是先进1024X1024百万像素级二维大面阵锑化铟红外焦平面阵列,可提供90°X 90°视场。F35用了这样6个相同的传感器,采用分布式孔径技术,分别布置于机身的上前方(机头)、左方(机头下腮)、右方(机头下腮)、下前方、上后方、下后方。这6个传感器,取消了前辈们用于支撑、转向和稳定的万向支架,以机身为平台,即直接固定在飞机结构上。
这里打个岔:有些文章上说,理论上需要4个就可以实现全部覆盖。笔者对此有异议:因为按照立体几何的球形空间计算,90°X90°相当于(π/2)X(π/2)的八分之一球体。如果要完全覆盖整个球体,理论上需要8个传感器。还要上机身克服机头、垂尾等气动外形的遮挡,严格来说是不完全覆盖的。这一点,非常欢迎大家的补充和评判。
EODAS的主要优势在于:
1、提高隐身性:采用分布式孔径系统的内埋方式,基本没有突出物,表面相对光顺。因此有利于载机的RCS的降低和气动性能,特别是超机动和超音速巡航时的气动改善。
2、降低体积重量。取消了支撑、转向结构,因此重量、体积都比传统的分立式甚至多光路光电设备大幅度降低,大约只有后者传感器的5%。(原文如此,笔者表示怀疑)。
3、降低成本:运行功耗降低,而且装备价格只有50万美元左右,大约只有传统光电设备的10%(原文如此,笔者表示怀疑)。
4、全方位态势感知:这一组6个传感器的准球形覆盖,实现了四代机的全方位态势感知和全空间敏感。EODAS可以同时输出多个波段的高帧频图像,并通过后续图像和数据融合,将全向信息提供给头盔显示器HMD、HUD或全景多功能显示器,呈现在飞行员面前,建立了“透明座舱”。比如,在飞行员垂直起降时,传感器图像将前后左右和下方的情况直接展示在眼前,成为一种名副其实的电子“后视镜”和“下视镜”,从而提供了“甲板穿透”功能。
5、替代效应:EODAS可以提供对空和对地目标搜索、目标指示与导弹告警、杀伤效果评估、辅助昼夜导航和起飞着陆防撞等多种功能。在很大程度上,代替了传统对地FLIR的成像跟踪和对空IRST的点源跟踪功能。(注意:有网友说EODAS只能对空不能对地,略有偏颇。结合上述第4和第5点,EODAS是可以提供有限的对地探测的。)
媒体报道:2010年的测试中,F35上的EODAS系统成功地探测到了1300km以外发射的一枚二级火箭,并随后对其进行了长达9分钟的跟踪,直至火箭发动机熄灭。在2011年的测试中,EODAS系统再次成功探测并跟踪了一架90公里以外迎头接近的F16战斗机。EODAS可将目标方位数据上传至中央计算器,引导APG-81雷达对目标进行视场2*2度的窄视场精确照射,然后发射中距空空弹进行攻击。这种攻击方式,APG-81不需要大范围搜索,从而降低了被敌方防空雷达捕获的可能性,实现了F35在攻击过程中的低可探侧性。
问题十二、EODAS的主要缺陷是什么?
1 视场较窄: 由于没有转向机构,EODAS的传感器只有理论上90°的视场。而传统机头上方IRST都有120°(±60°)的探测范围,FLIR球形吊舱探测角度更大,可达360°。
有朋友为EODAS叫屈了,一个传感器视场角度不够,那人家不是有6个传感器吗?
说的对,F35就是这么做的,多传感器相互配合使用,但这恰好带来了另一个问题——
2 图像移动: 首先,EODAS的平台是载机本身,不同传感器在载机的不同部位。这些部位的振动、扭转各有不同;再有,飞机的感应角运动(横滚、俯仰和偏航)和平移运动(速度)会引起传感器看到的景象发生移动;同时,载机瞄准的导弹、敌机等空中目标也在运动。当多个目标从一个传感器的搜索范围运动到另一个传感器范围内的时候,EODAS系统必须识别清楚它们之间的对应关系。而且这个运动过程中,随着载机和目标都有空中速度和加速度,那么新传感器中的目标的运动要素与第一个传感器相比会有所变化。
因此,EODAS系统必须保持对每个传感器瞄准线的最佳了解,要使用局部惯性传感器来评估参照飞机惯性参照系的局部瞄准线。通过比较传感器之间重叠区域的图像数据,对瞄准线进行良好的调整。对不同传感器的图像,要实时运用“图像缝合算法”,弥补位于不同方向传感器测量的视差。
上述种种,对EODAS的图像处理能力提出了很高的要求,这又带来了我们要提出的第三个问题:
3 图像处理能力: EODAS使用百万级高像素探测器,又一组用了6个,还要实时缝合图像——这给图像处理带来了巨大的压力。以每个像素每秒运算10次,每秒100帧图像计算,仅仅处理1个探测器图像的能力就要达到100万X10次X100帧=每秒十亿次(BOPS)的级别甚至更高。这还不算完,计算完的融合图像信息,必须准实时在HMD或HUD上叠加,呈现给飞行员。为了避免使用HMD时产生的错误赝像,无畸变或极低畸变的无缝图像至关重要,因此0.5~1.0mrad 的高分辨率图像被认为是最低可接受的范围。这给数据传输和图像显示又带来了巨大挑战。
图像计算-数据传输-数据融合-图像展现,这就是EODAS面临的图像处理能力问题。
4 内部冷却 由于上述高性能传感器、高速处理器都在载机内,四代机的超巡又带来的高速高温的问题,因此,EODAS的内部冷却,即环控问题,超出了低速固定翼飞机的设计范畴,更是低空低速直升机的光电设备所无法想象的难题。
这也是为什么,EODAS在F35上实际使用后,被这些问题限制了其很多功能和性能的发挥,目前还是主要被当做态势感知(即视觉包络)在使用,而无法主导对地攻击这样的功能。资料显示,EODAS的问题,已经成为F35战斗力生成迟缓,项目拖延的原因之一。
问题十三、 为什么EODAS系统之外还需要EOTS系统?
EOTS(Electro-Optical Targeting System,电光瞄准系统)是美国洛马研制装备F35的机载光电设备,采用第三代红外焦平面阵列器件和模块化设计。而且,其安装方式与J20的那颗痣一样,就在F35的下巴上。

F35的ETOS光窗
这个图对大家肯定是脸熟了。
如图所示,EOTS属于半埋设计,设备基本上在机内,外露的只有由7块表面镀膜的蓝宝石平面玻璃组成的光窗,以散射雷达信号,减小飞机的RCS,比传统外挂式设备隐身性有很大提高。当然,比较EODAS,这个优点就成为缺点了。
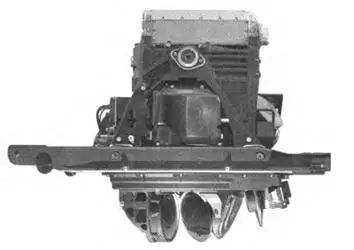
EOTS内部结构(除了最下面的传感器,绝大部分机构在机体内)
隐身比不了EODAS,那EOTS真正的优势在哪里呢?
1、共光路对地高精度探测设备: 在问题十中,我们介绍过共光路这个给概念。EOTS设备用单一口径光窗,集成可见光摄像机、红外成像、激光器测距机、激光光斑跟踪器、激光指示器等全套行头,全重90. 8 kg。具备可见光高分辨率成像、自动跟踪、红外搜索和跟踪、激光指示、测距功能,提供了强大的对地攻击功能。根据前文问题1到问题6的介绍,大家可以判断出,EOTS具备从搜索到跟踪、从发现到识别、从测角到测距的全套光电火控功能。这一点胜过了EODAS。
2、大视场 EOTS的光学探测器可以通过转动,不需要图像缝合的复杂处理技术与计算能力,就能够轻松提供360°全向视野。这也比EODAS要方便实用。
3 先进稳瞄系统 前文说过,机体振动和位移将导致图像畸变,而EODAS靠复杂的图像处理来解决这个问题。但仍然无法满足对地攻击的性能。EOTS不像EODAS直接安装在机体上,而是具备独立的稳瞄设备。稳瞄设备并不是新鲜事,直升机的稳瞄设备就是最通常的例子。直升机为应对旋翼挥舞导致的振动,采用两轴四框架稳定平台的万向支架隔离扰动。美军二代FLIR采用的稳瞄系统,稳定精度就已经达到20-50微弧度,最新一代直升机甚至达到5-10微弧度。
而EOTS的稳瞄系统,其稳定度在2-5微弧度。 注:1微弧度(urad)=1/1000毫弧度(mrad)1毫弧度=1度
微弧度,这是什么概念呢? 举个例子,1微弧度的稳定精度,意味着10公里距离晃动幅度为:1厘米。再举个例子对比一下,人眼对角度的最高分辨率为0.15毫弧度。
EOTS的这个超级稳瞄精度,为其地面精确打击提供了光电神眼,弥补了EODAS缺乏对地攻击能力的缺陷。
EOTS的上述三大优势,在很大程度上回答了网上争论的一个“既生瑜,何生亮”的问题,即在F35已经有全内埋方式EODAS的情况下,为什么还要一个半埋的EOTS?
个人观点认为,EODAS的分布式、内埋式光电系统的技术领先,代表了机载光电探测的未来。但是就目前而言,缺乏高级稳瞄系统和缝合大视场的EODAS,依靠尚不完美的图像处理技术,很难提供精确光电火控的闭环跟踪功能。而EOTS恰恰利用数十年来几代FLIR/IRST的技术经验积累,提供了次佳但更可用的光电火控技术。反之,如果EODAS已经足够成熟,就难以解释:F35这一种战机,为什么要选择诺格-洛马两个厂家的两套光电系统?为什么要在已经具有更高技术水平的分布式孔径光电系统的情况下,仍然要装备RCS更大的EOTS。
问题十四、EOTS的主要缺陷在哪里?
1 动态像差 EOTS提供360°全向视野,多平面半埋光窗满足了与F35结构共形的要求,但同时也产生了动态像差。也就是说,当光学系统通过不同角度的窗口镜块之间的接合面成像时,会导致光程(optical path length :OPL)随瞄准角变化而变化。在窗镜块之间会有不同的光程差( optical path difference :OPD) ,使得分割波面产生一定位相差。再有,光窗的透射率可能因入射角变化而变化。最后高速飞行时的高温影响成像效果。
解决上述问题的主要手段是:实现透过不连续窗口分段波前的共相位校正;窗口平板的精准拼接;抑制拼接窗口内部的杂散光;消除平板拼接处高速飞行与空气磨擦产生的热梯度;高超音速高速飞行后的光学自适应,等等。
2 对空探测受限 由于EOTS安装与机头下方,限制了对空探测能力,无法对前上方空域进行探测。但是,EOTS还是能够提供远距离窄视场的对空探测能力,如远距离导弹告警能力。(注意:正如EODAS在对空为主的情况下,仍具备有限对地探测能力;而EOTS是对地为主,却也能对空为辅。因此并非像有的网友所说,EOTS完全对地,EODAS完全对空)
聊完了美国人的EOTS/EODAS,中国的机载光电设备又有什么发展,说好的中国J20的那颗痣呢?
问题十五、J20的那颗痣,究竟是什么?
做了前置这么多铺垫,终于要说说这货了。
这应该就是搜索瞄准一体化的机载光电设备——中国版EOTS。
首先,J20已经具备了装备EOTS的可能性。从2011和黄皮机的照片中,如果还不能完全得出这样的肯定,那么简氏防务周刊和观察者网、超大等国内外媒体大幅报道的2015年7月19日,中国军民融合技术装备北京博览会上,中陆航星的EOTS-86,则直接将结论打上了牢牢的印鉴。

EOTS-86
在展板上我们能够看到这样的说明:
“EOTS-86系统是一款最新设计的机载内埋式光电搜索瞄准系统” ——半内埋好吧,谦虚点
“适装于歼20、歼31、SU-27系列、T-50、苏34、轰6K、图-160等机型” ——第一个适装对象就是J20/J31,看来装备四代机那是妥妥的;SU-27系列,意味着我军大量三代机的中期改装是可能的,轰六K平台大更不在话下。但看来看去,没有轻型的J10系列。而且,近期J10B的图流出来也还是传统IRST的模样。也对,J10主要是对空,对地EOTS急迫性不强。等一等……还有T50啊,出口导向很明确嘛。
“含远红外搜索、中红外跟踪、激光测照等多种探测模式” ——长波+中波+激光经典集成模式(复习问题4-5)
“主要用于对空、地、海昼夜搜索、精确跟踪和瞄准以及武器制导。可以在雷达关机的情况下以空空、空面模式搜索和跟踪目标,并能够为飞行员准确指示目标位置。可与红外全景搜索系统、机载火控雷达配合使用,可对红外全景搜索系统或机载火控雷达搜索的目标进行精确跟踪、定位及瞄准,引导机载武器系统攻击目标。可与头盔瞄准具联动工作” ——搜索+跟踪+制导+联动头描(复习问题6-7)。估计和洛马那边的说明书一个字不差啊,呵呵。注意,有空空模式,可以对空搜索啊,侧面说明了F35的EOTS也不会是只能对地吧。
“对F22发现距离110公里,对B2发现距离150公里” ——以EOTS-86的精确红外测角数据给机载AESA雷达,后者再做窄视角凝视扫描,就可以引导中远程空空导弹攻击隐身目标。说这是中国反隐身装备的一大突破,绝不为过。同时,说EOTS只能对地的同学,可以思考一下这个功能。最后,这个说明应该这是给美军看的,要不完全可以说“对大型/典型隐身目标”这样的字眼。现在这么直白,完全是气死人不偿命啊.
“重量48公斤,寿命10000小时(20年)” ——咦?比F35的EOTS90.8公斤,轻了差不多一半(复习问题13),什么古怪的思密达?
这位问了,我兔把EOTS搞定了,那么,EODAS呢? | 
 狗仔卡
狗仔卡 发表于 2016-4-6 10:58 PM
发表于 2016-4-6 10:58 PM
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡